matlab
nginx
pycharm
PMP
python考级
实时音视频
信号量
PIXIjs
并发
可用性测试
信号完整性
大模型
镜像源
逻辑运算符
数据库开发
Java语言
产品线
下午题
sbt
攻防演练
VIO
2024/4/12 15:07:20
非线性优化问题基本形式概述
非线性优化问题以及在视觉SLAM中的应用
1.0 最小二乘基础概念
定义 \quad找到一个 n 维的变量 x∗∈Rn\mathbf{x}^{*} \in \mathbb{R}^{n}x∗∈Rn , 使得损失函数 F(x)F(\mathbf{x})F(x) 取局部最小值: F(x)12∑i1m(fi(x))2F(\mathbf{x})\frac{1}{2} \sum_{i1}^{m…

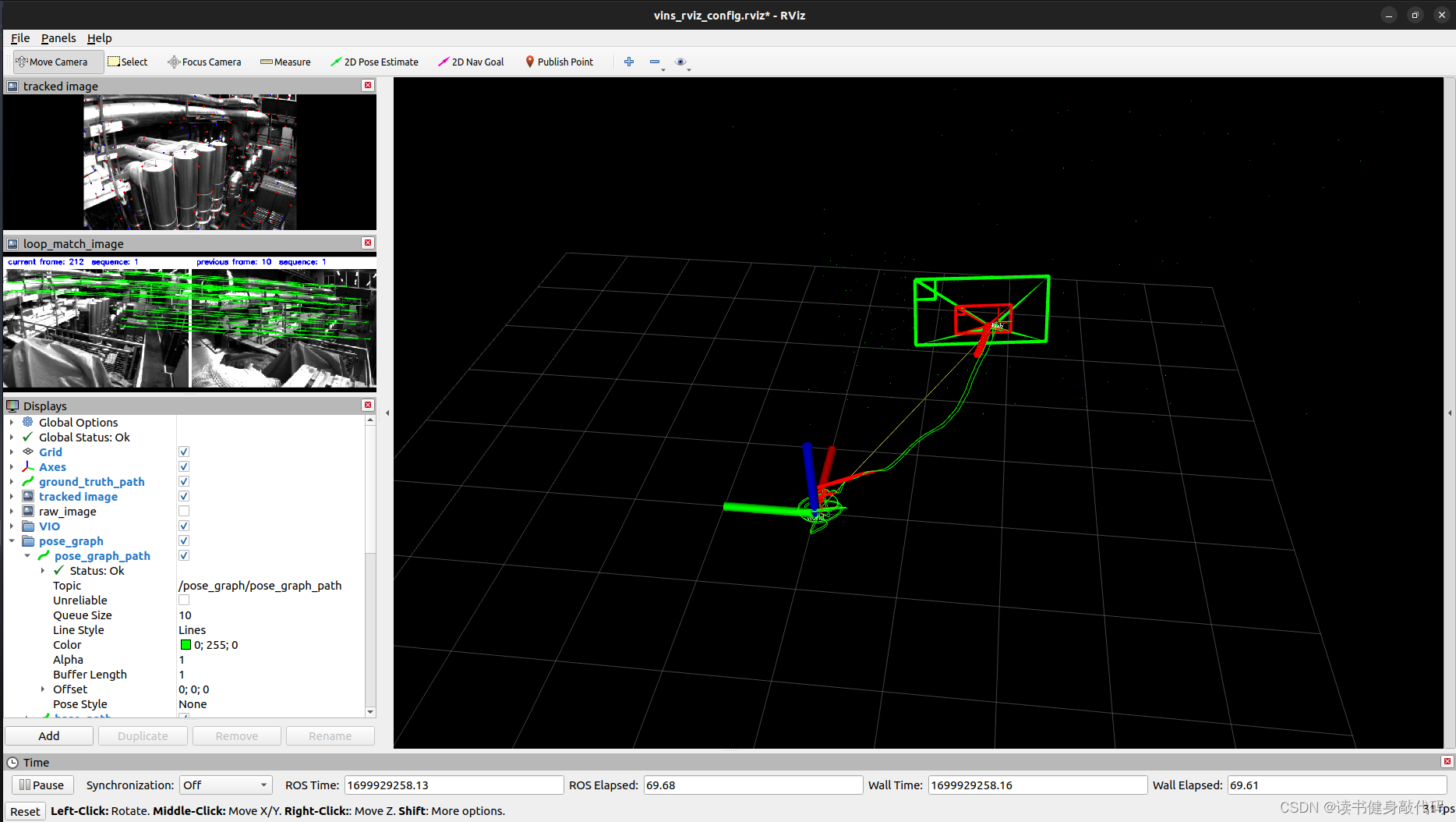
px4+vio实现无人机室内定位
文章主要讲述px4 如何利用vins_fusion里程计数据实现在室内定位功能。
文章基于以下软、硬件展开。
硬件软件机载电脑: Intel NUC系统:Ubuntu 20.04相机: Intel Realsense D435iros:noetic飞控:Pixhawk 2.4.8固件&am…
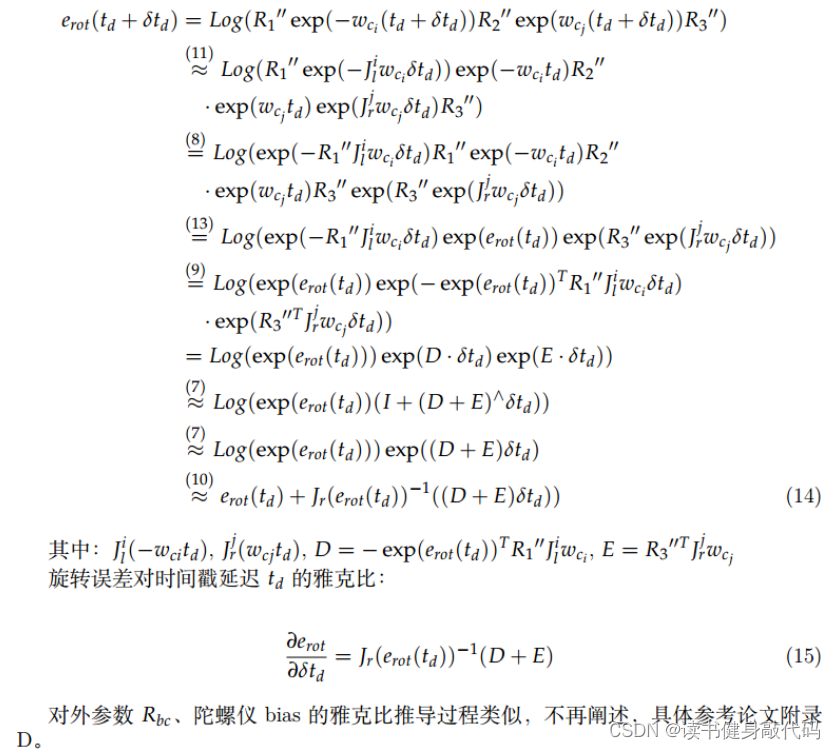
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--作业
0. 题目 1. T1 逆深度参数化时的特征匀速模型的重投影误差
参考常鑫助教的答案:思路是将i时刻的观测投到world系,再用j时刻pose和外参投到j时刻camera坐标系下,归一化得到预测的二维坐标(这里忽略了camera的内参,逆深…
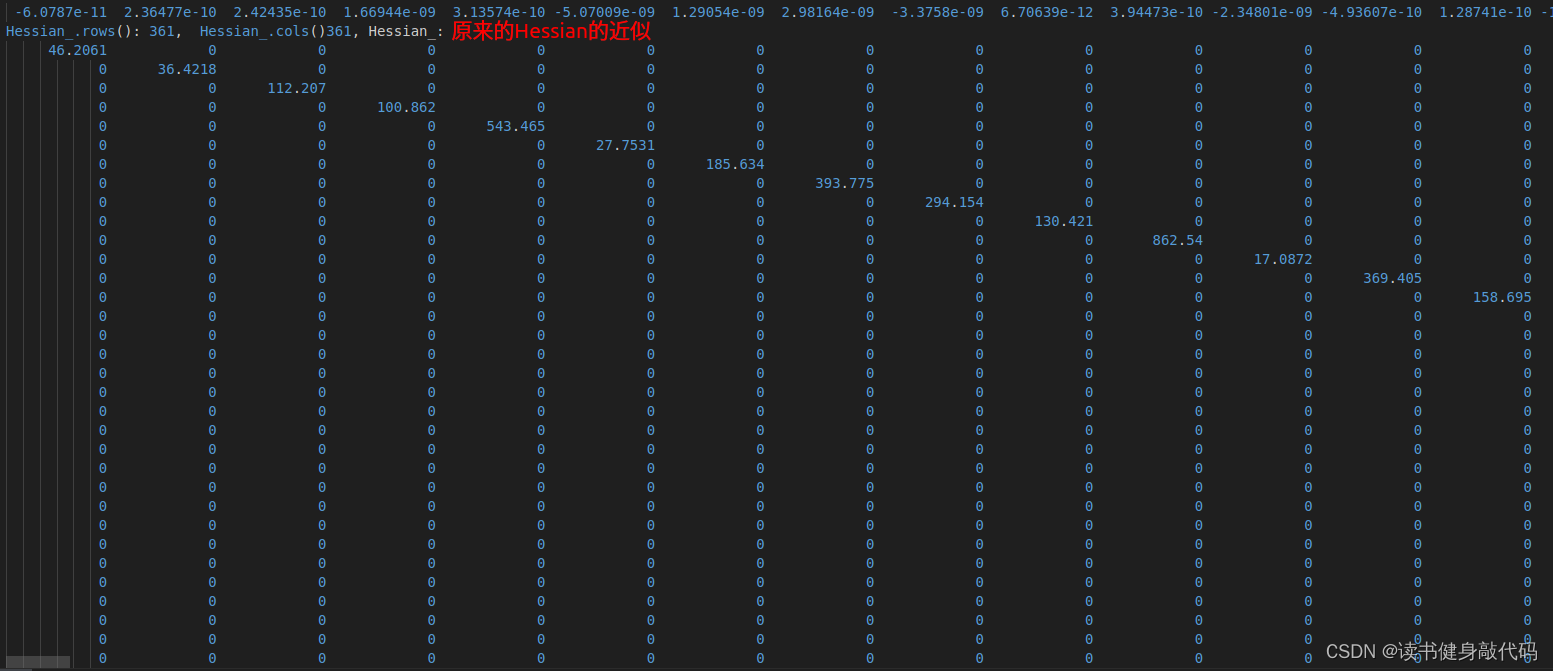
VINS-MONO拓展1----手写后端求解器,LM3种阻尼因子策略,DogLeg,构建Hessian矩阵
文章目录 0. 目标及思路1. 非线性优化求解器2. 基于VINS-MONO的Marginalization框架构建Hessian矩阵2.1 estimator.cpp移植2.2 solve.cpp/preMakeHessian()2.3 solve.cpp/makeHessian() 3. solve.cpp/solveLinearSystem()求解正规方程4. 更新状态5. 迭代求解6. EVO评估结果7. 待…
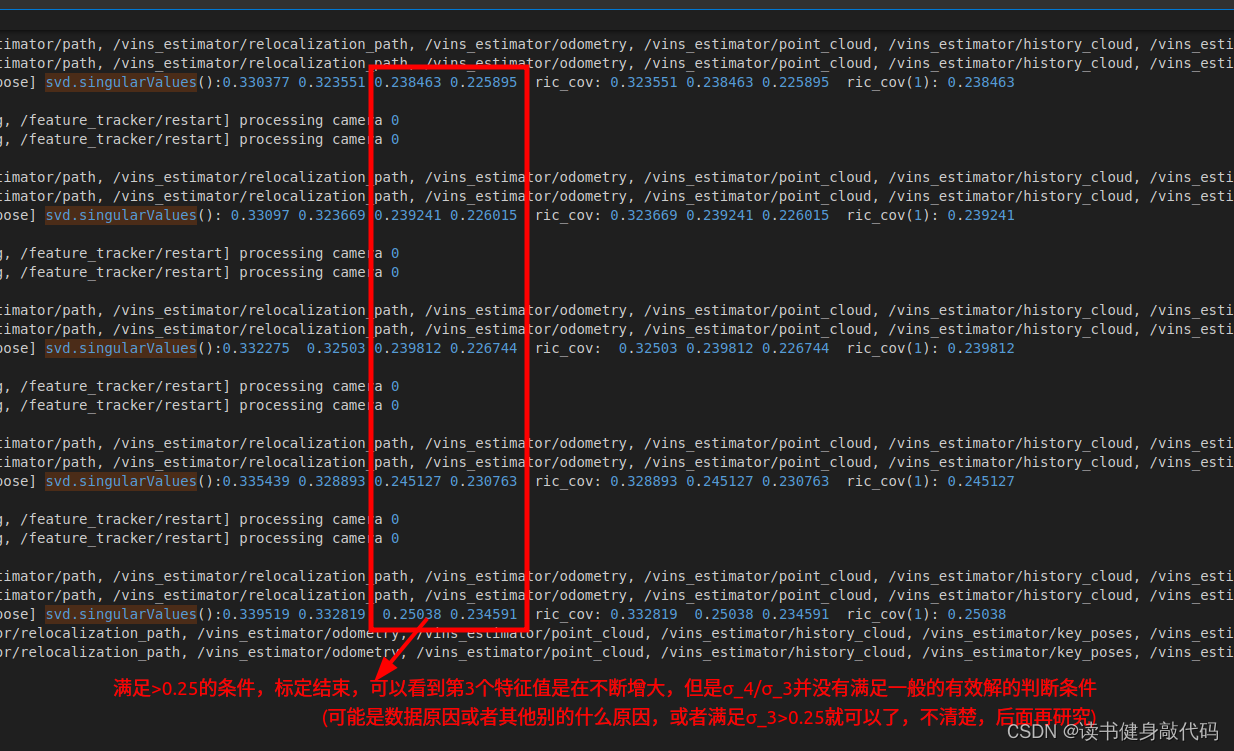
VINS-MONO代码解读----vins_estimator(鲁棒初始化部分)
0. 前言
整个初始化部分的pipeline如下所示,参照之前的博客,接下来根据代码一步步讲解。
1. 旋转约束标定旋转外参Rbc
上回讲了processImage中addFeatureCheckParallax完成了对KF的筛选,我们知道了2nd是否为KF,接下来是初始化…
Ubuntu22.04源码安装ROS-noetic(ROS1非ROS2),编译运行VINS-MONO
1. Ubuntu22.04源码编译安装ROS-noetic
由于22.04默认安装ROS2,但很多仓库都是基于ROS1的,不想重装系统,参考这两个博客安装了ROS-noetic:
博客1. https://blog.csdn.net/Drknown/article/details/128701624博客2. https://zhua…
VINS-MONO代码解读----配置文件,数据结构,前端feature_tracker
跑通代码之后可以深入看代码了,整体代码很多,可先从配置文件开始看。
1. VINS-MONO配置文件理解
参考启动文件launch与参数配置文件yaml介绍
启动文件launch:euroc.launch
参数配置文件yaml:euroc_config.yaml:包括…
【深蓝学院】手写VIO第9章--课程总结--笔记
0. 内容 1. 课程回顾 最大后验概率MAP,如果不知道先验则是MLE,如果观测服从高斯分布(关于为什么服从高斯分布有个pdf)则可转化为LSP。 残差构建主要讲了IMU残差的构建,包括预积分模型,误差模型(…
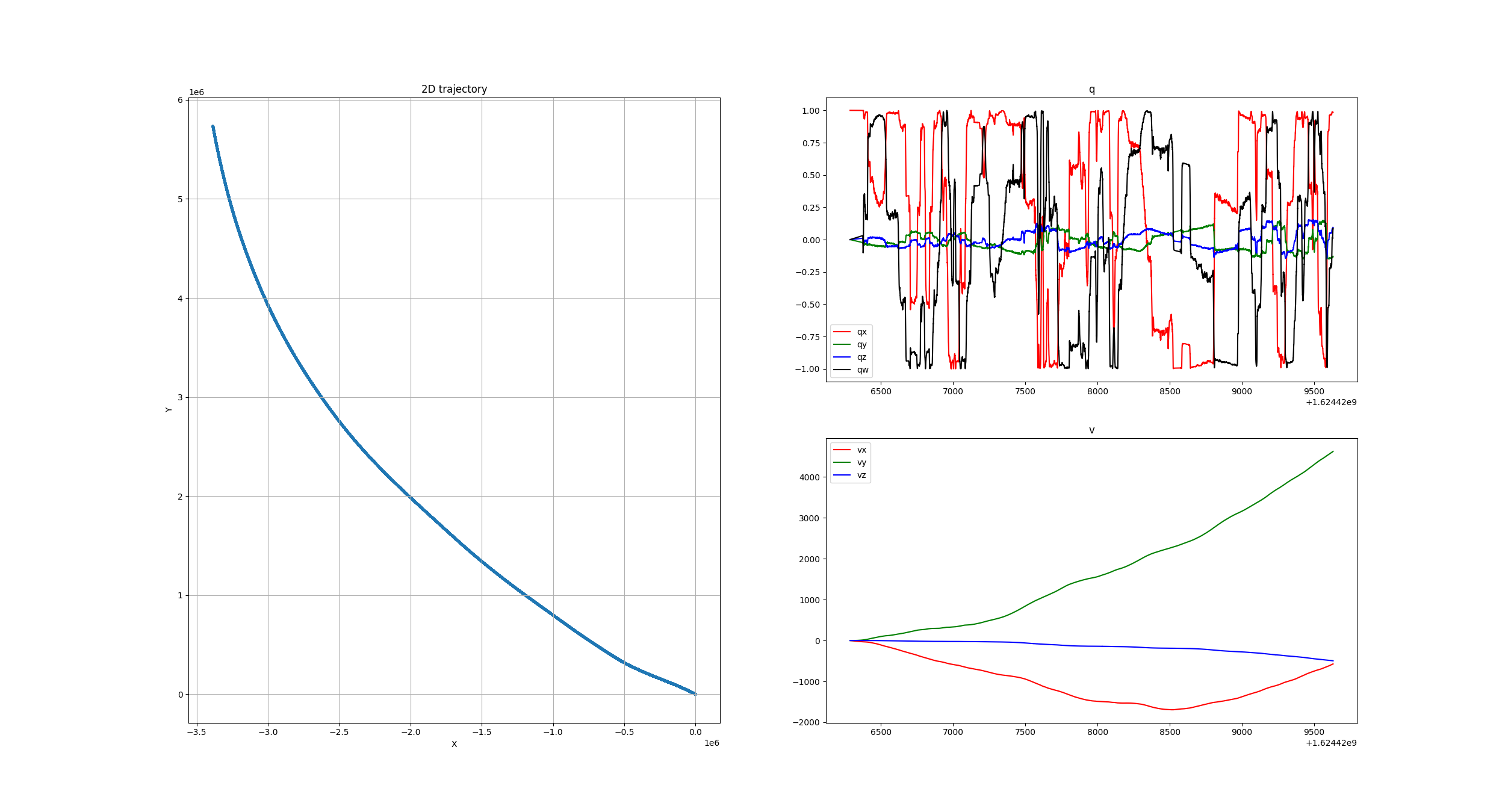
IMU 积分进行航迹推算
IMU 积分进行航迹推算 Reference https://github.com/gaoxiang12/slam_in_autonomous_driving 1.0 递推方程推导 \quad 连续时间内的 IMU 运动学方程: R ˙ R ω ∧ q 1 2 q ω ˙ p ˙ v v ˙ a \dot{\mathbf{R}}\mathbf{R}\omega ^{\wedge} \\ \dot{\mathbf{…